





Motor stepper sekrup bola hibrida Nema 23 (57mm) dengan sudut langkah 1,8° dan 4 kabel penghantar untuk peralatan diagnostik medis.
Motor stepper sekrup bola hibrida Nema 23 (57mm) dengan sudut langkah 1,8° dan 4 kabel penghantar untuk peralatan diagnostik medis.
Motor stepper hibrida Nema 23 (57mm), bipolar, 4-lead, ball screw, kebisingan rendah, umur panjang, kinerja tinggi, bersertifikasi CE dan RoHS.
Kapasitas beban besar, getaran kecil, kebisingan rendah, kecepatan tinggi, respons cepat, pengoperasian lancar, umur panjang, akurasi pemosisian tinggi (hingga ±0,005mm)
Keterangan
| Nama Produk | Motor stepper sekrup bola hibrida 57mm |
| Model | VSM57BSHSM |
| Jenis | motor stepper hibrida |
| Sudut Langkah | 1,8° |
| Tegangan (V) | 2.3 / 3 / 3.1 / 3.8 |
| Arus (A) | 3/4 |
| Hambatan (Ohm) | 0,75 / 1 / 0,78 / 0,95 |
| Induktansi (mH) | 2,5 / 4,5 / 3,3 / 4,5 |
| Kabel Timbal | 4 |
| Panjang Motor (mm) | 45 / 55 / 65 / 75 |
| Suhu Sekitar | -20℃ ~ +50℃ |
| Kenaikan Suhu | Maksimal 80 ribu. |
| Kekuatan Dielektrik | 1mA Maks. @ 500V, 1KHz, 1 Detik. |
| Resistansi Isolasi | 100MΩ Min. @500Vdc |
Sertifikasi

Parameter Kelistrikan:
| Ukuran Motor | Voltase /Fase (V) | Saat ini /Fase (A) | Perlawanan /Fase (Ω) | Induktansi /Fase (mH) | Jumlah Kabel Timbal | Inersia Rotor (g.cm2) | Berat Motor (G) | Panjang Motor L (mm) |
| 57 | 2.3 | 3 | 0,75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0,78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0,95 | 4.5 | 4 | 480 | 950 | 75 |
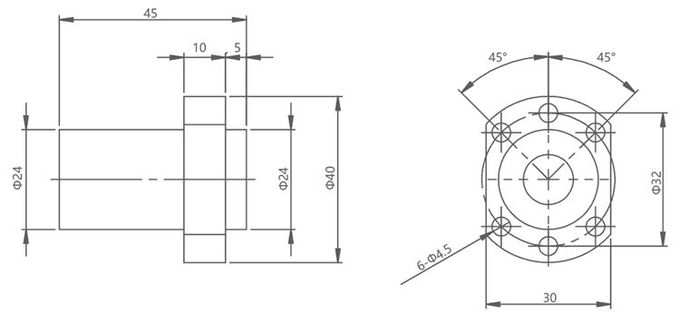
Gambar sketsa motor eksternal standar VSM57BSHSM:
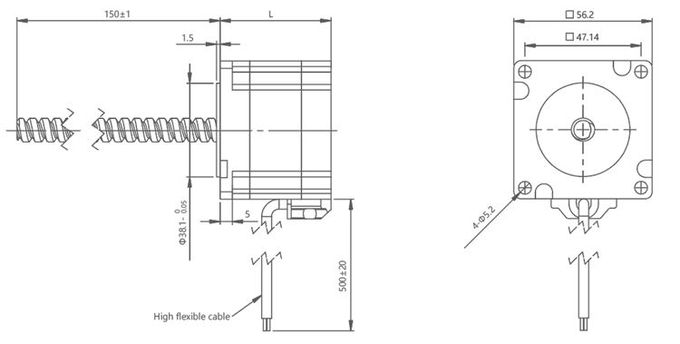
Catatan:
Panjang ulir penggerak dapat disesuaikan.
Pemesinan khusus dimungkinkan di ujung ulir penggerak.
Silakan hubungi kami untuk spesifikasi sekrup bola lebih lanjut.
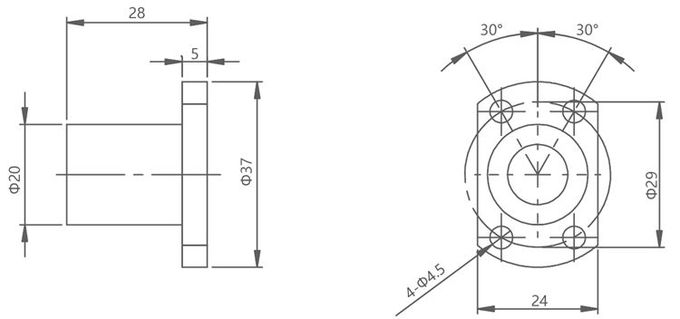
Gambar sketsa mur bola VSM57BSHSMBall 1202:
Gambar sketsa mur bola VSM57BSHSMBall 1205:
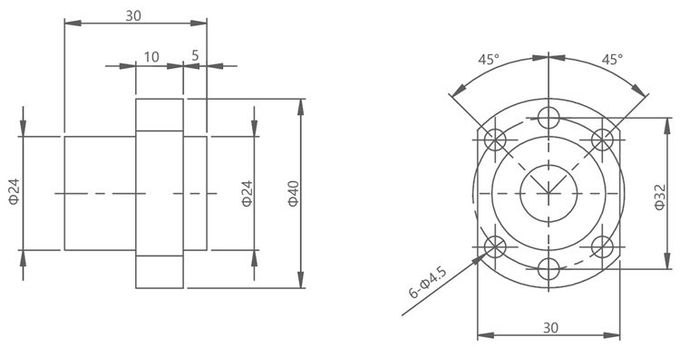
Gambar sketsa mur bola VSM57BSHSMBall 1210:
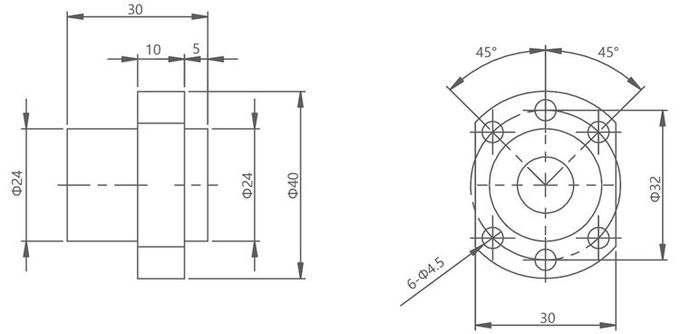
Gambar sketsa mur bola VSM57BSHSMBall 1210:
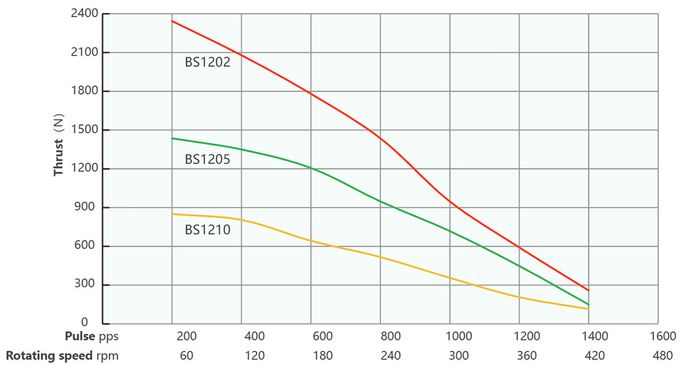
Kurva kecepatan dan daya dorong
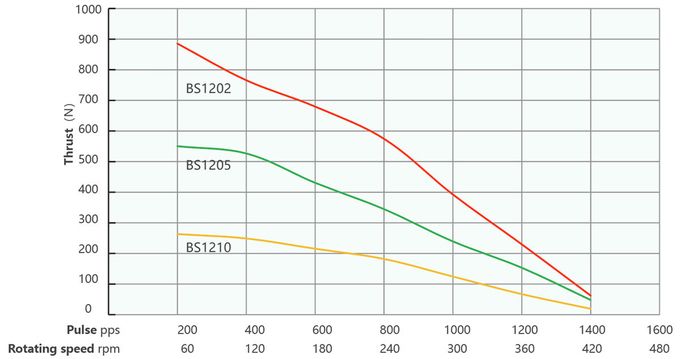
Penggerak Chopper bipolar seri 57 dengan panjang motor 45mm
Frekuensi pulsa arus 100% dan kurva dorong
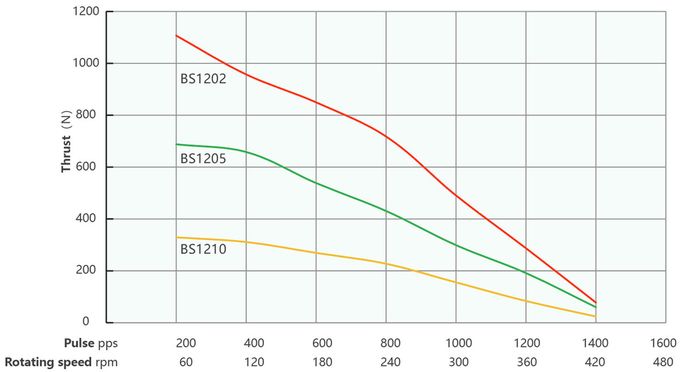
Penggerak Chopper bipolar seri 57 dengan panjang motor 55mm
Frekuensi pulsa arus 100% dan kurva dorong
| Jarak (mm) | Kecepatan linier (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Kondisi pengujian:Penggerak chopper, tanpa peningkatan tegangan bertahap, setengah mikro-langkah, tegangan penggerak 40V
Penggerak Chopper bipolar seri 57 dengan panjang motor 65mm
Frekuensi pulsa arus 100% dan kurva dorong
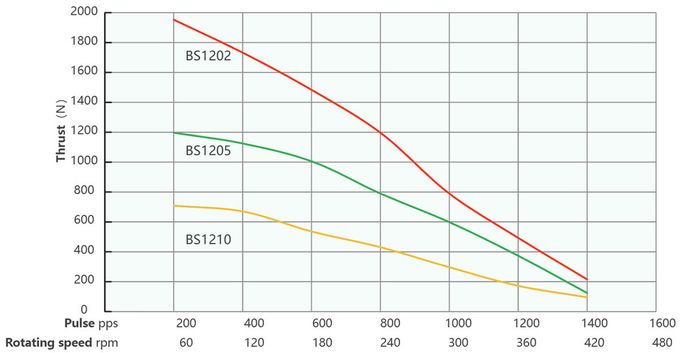
Penggerak Chopper bipolar seri 57 dengan panjang motor 75mm
Frekuensi pulsa arus 100% dan kurva dorong
| Jarak (mm) | Kecepatan linier (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Kondisi pengujian:Penggerak chopper, tanpa peningkatan tegangan bertahap, setengah mikro-langkah, tegangan penggerak 40V
Bidang aplikasi:
Peralatan diagnostik medis:Motor stepper sekrup bola hibrida 57mm dapat digunakan dalam peralatan diagnostik medis seperti pemindai gambar, pemindai CT, peralatan sinar-X, instrumen MRI, dan sebagainya. Kontrol posisi dan stabilitasnya yang sangat presisi memungkinkan pergerakan dan pemosisian yang tepat selama akuisisi dan pemrosesan gambar medis.
Instrumen Ilmu Hayati:Dalam penelitian dan eksperimen ilmu hayati, motor stepper sekrup bola hibrida 57mm digunakan dalam sistem penanganan cairan otomatis, peralatan penyaringan berkecepatan tinggi, perangkat kultur sel, pengurut gen, dan banyak lagi. Presisi dan keandalan tinggi dari motor ini memungkinkan mereka untuk memenuhi permintaan akan kontrol gerakan dan posisi yang tepat dalam peralatan eksperimental.
Robotika:Motor stepper sekrup bola hibrida 57mm banyak digunakan dalam robotika untuk penggerak sendi, gerakan lengan robot, dan pemosisian presisi. Motor ini dicirikan oleh torsi tinggi, resolusi tinggi, dan kebisingan rendah untuk memenuhi permintaan akan gerakan dan kontrol presisi dalam aplikasi robotika.
Peralatan laser:Motor stepper sekrup bola hibrida 57mm dapat digunakan pada peralatan laser untuk tugas-tugas seperti penyesuaian fokus, meja putar, dan kontrol jalur optik. Kontrol posisi dan stabilitasnya yang sangat presisi memungkinkan motor ini mewujudkan pemfokusan dan pemosisian sinar laser yang tepat.
Instrumen Analitik:Pada berbagai jenis instrumen analitik laboratorium, motor stepper sekrup bola hibrida 57mm dapat digunakan dalam pemrosesan sampel otomatis, sistem pengumpanan sampel, kromatograf cair, kromatograf gas, dan lain-lain. Gerakan presisi tinggi dan kinerja stabil motor ini memainkan peran penting dalam meningkatkan akurasi dan efisiensi analisis laboratorium.
Peralatan produksi semikonduktor dan elektronik:Motor stepper sekrup bola hibrida 57mm digunakan untuk pemosisian presisi dan kontrol otomatisasi pada peralatan produksi semikonduktor dan elektronik. Misalnya, motor ini dapat digunakan pada peralatan uji chip semikonduktor, mesin pengemasan, teknologi pemasangan permukaan (surface mount technology), pembuatan papan sirkuit tercetak (PCB), dan bidang lainnya untuk memberikan kontrol gerakan berkecepatan tinggi, presisi tinggi, dan andal.
Peralatan otomatisasi non-standar dan berbagai jenis peralatan otomatisasi:Motor stepper sekrup bola hibrida 57mm cocok untuk berbagai peralatan otomatisasi non-standar dan jalur produksi otomatis. Motor ini dapat digunakan pada peralatan pemosisian, sistem perakitan otomatis, peralatan pengemasan, mesin cetak, peralatan tekstil, dll. Motor ini memberikan kontrol posisi yang presisi dan kinerja gerakan yang andal untuk memenuhi kebutuhan otomatisasi di berbagai bidang.
Keuntungan
Rasio Torsi terhadap Inersia yang Tinggi:Motor stepper ulir bola hibrida memiliki rasio torsi terhadap inersia yang tinggi, yang berarti motor ini dapat menghasilkan torsi yang signifikan relatif terhadap ukuran dan beratnya. Hal ini menjadikannya ideal untuk aplikasi yang membutuhkan torsi tinggi dalam bentuk yang ringkas, seperti robotika, mesin CNC, dan sistem otomatisasi.
Akselerasi dan Deselerasi Tinggi:Motor-motor ini mampu berakselerasi dan deselerasi dengan cepat, memungkinkan pergerakan yang cepat dan presisi. Inersia rotor yang rendah dan output torsi yang tinggi memungkinkan motor untuk merespons sinyal kontrol dengan cepat, menghasilkan waktu start-stop yang lebih cepat dan peningkatan kinerja sistem secara keseluruhan.
Microstepping Halus:Motor stepper sekrup bola hibrida sangat cocok untuk operasi microstepping, yang memungkinkan resolusi lebih halus dan kontrol gerakan yang lebih lancar. Microstepping membagi setiap langkah penuh menjadi sub-langkah yang lebih kecil, mengurangi ukuran langkah dan meminimalkan getaran, kebisingan, dan efek resonansi. Fitur ini sangat bermanfaat dalam aplikasi yang membutuhkan gerakan yang halus dan presisi, seperti printer 3D dan sistem pemosisian linier.
Reaksi Negatif Rendah:Mekanisme ulir bola pada motor ini membantu meminimalkan celah (backlash), yaitu jarak atau jarak bebas antara rotor dan beban. Celah yang rendah memastikan pemosisian yang akurat dan pengulangan yang baik, karena pergerakan yang hilang minimal saat mengubah arah atau membalikkan gerakan. Hal ini sangat penting untuk aplikasi yang membutuhkan pemosisian yang presisi dan berulang, seperti mesin pick-and-place dan sistem optik.
Respons Dinamis Tinggi:Kombinasi motor stepper hibrida dan mekanisme sekrup bola memungkinkan respons dinamis yang tinggi, artinya motor dapat dengan cepat dan akurat mengikuti perubahan sinyal kontrol. Responsivitas ini sangat penting untuk aplikasi yang melibatkan perubahan kecepatan, arah, atau posisi yang cepat, seperti pemesinan kecepatan tinggi dan sistem kontrol gerak dinamis.
Efisiensi Termal:Motor stepper sekrup bola hibrida dirancang untuk memiliki efisiensi termal yang baik, memungkinkan pembuangan panas yang efektif selama pengoperasian. Hal ini membantu mencegah panas berlebih dan memastikan kinerja motor yang stabil, bahkan selama penggunaan yang lama atau dalam aplikasi yang menuntut.
Solusi Hemat Biaya:Motor stepper sekrup bola hibrida menawarkan solusi hemat biaya untuk aplikasi yang membutuhkan presisi dan torsi tinggi. Dibandingkan dengan sistem motor servo yang lebih kompleks dan mahal, motor stepper hibrida memberikan keseimbangan antara kinerja, biaya, dan kemudahan penggunaan. Motor ini sering menjadi pilihan utama untuk aplikasi di mana biaya merupakan faktor penting, tanpa mengorbankan kualitas dan kinerja.
Persyaratan Pemilihan Motor:
►Arah pergerakan/pemasangan
►Persyaratan Pemuatan
►Persyaratan Stroke
►Persyaratan pemesinan akhir
►Persyaratan Presisi
►Persyaratan Umpan Balik Encoder
►Persyaratan Penyesuaian Manual
►Persyaratan Lingkungan
Bengkel produksi






