.jpg)
.jpg)
.jpg)
.jpg)
Motor stepper hibrida Nema 23 (57mm), bipolar, 4-lead, sekrup ulir ACME, kebisingan rendah, umur panjang, kinerja tinggi.
Motor stepper hibrida Nema 23 (57mm), bipolar, 4-lead, sekrup ulir ACME, kebisingan rendah, umur panjang, kinerja tinggi.
Motor stepper hibrida 57mm ini tersedia dalam tiga tipe: penggerak eksternal, penggerak melalui sumbu, dan penggerak melalui sumbu tetap. Anda dapat memilih sesuai dengan kebutuhan spesifik Anda.
Motor ini tersedia dalam ukuran 20mm, 28mm, 35mm, 42mm, 57mm, 86mm.
Panjang langkah, 0,001524mm~0,127mm
Performa Daya dorong maksimum hingga 240 kg, kenaikan suhu rendah, getaran rendah, kebisingan rendah, umur pakai panjang (hingga 5 juta siklus), akurasi pemosisian tinggi (hingga ±0,01 mm)
Deskripsi
| Nama Produk | Motor stepper hibrida 57mm |
| Model | VSM57HSM |
| Jenis | motor stepper hibrida |
| Sudut Langkah | 1,8° |
| Tegangan (V) | 2.3 / 3 / 3.1 / 3.8 |
| Arus (A) | 3/4 |
| Hambatan (Ohm) | 0,75 / 1 / 0,78 / 0,95 |
| Induktansi (mH) | 2,5 / 4,5 / 3,3 / 4,5 |
| Kabel Timbal | 4 |
| Panjang Motor (mm) | 45 / 55 / 65 / 75 |
| Suhu Sekitar | -20℃ ~ +50℃ |
| Kenaikan Suhu | Maksimal 80 ribu. |
| Kekuatan Dielektrik | 1mA Maks. @ 500V, 1KHz, 1 Detik. |
| Resistansi Isolasi | 100MΩ Min. @500Vdc |
Sertifikasi

Parameter Kelistrikan:
| Ukuran Motor | Voltase /Fase (V) | Saat ini /Fase (A) | Perlawanan /Fase (Ω) | Induktansi /Fase (mH) | Jumlah Kabel Timbal | Inersia Rotor (g.cm2) | Berat Motor (G) | Panjang Motor L (mm) |
| 57 | 2.3 | 3 | 0,75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0,78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0,95 | 4.5 | 4 | 480 | 950 | 75 |
Spesifikasi dan parameter kinerja ulir penggerak
| Diameter (mm) | Memimpin (mm) | Melangkah (mm) | Matikan daya, gaya penguncian otomatis (N) |
| 9.525 | 1.27 | 0,00635 | 800 |
| 9.525 | 2.54 | 0,0127 | 300 |
| 9.525 | 5.08 | 0,0254 | 90 |
| 9.525 | 10.16 | 0,0508 | 30 |
| 9.525 | 25.4 | 0,127 | 6 |
Catatan: Untuk spesifikasi ulir penggerak yang lebih lengkap, silakan hubungi kami.
Gambar sketsa motor eksternal standar VSM57HSM:
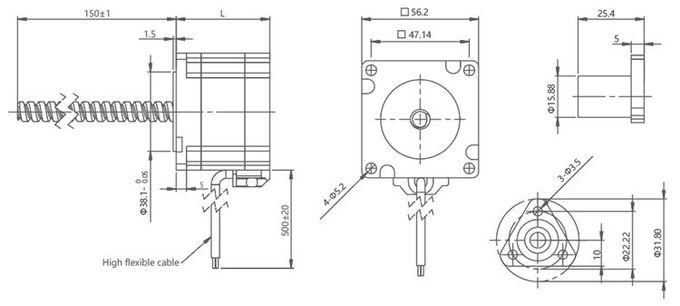
Catatan:
Panjang ulir penggerak dapat disesuaikan.
Pemesinan khusus dimungkinkan di ujung ulir penggerak.
Gambar sketsa motor stepper hibrida 57mm standar dengan pemasangan motor tetap:
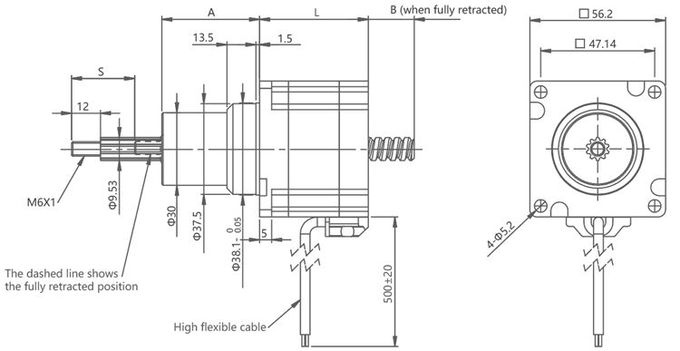
Catatan:
Pemesinan khusus dimungkinkan di ujung ulir penggerak.
| Stroke S (mm) | Dimensi A (mm) | Dimensi B (mm) | |||
| L = 45 | L = 55 | L = 65 | L = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36,8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0,2 | 0 |
| 38.1 | 49,5 | 26,5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63,5 | 74,9 | 51,9 | 42,9 | 31.9 | 21.9 |
Gambar Garis Besar Motor Stepper Hibrida 57mm Standar Motor Tetap Tembus
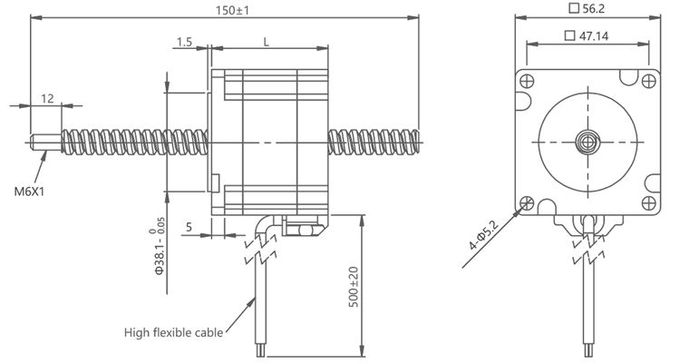
Catatan:
Panjang ulir penggerak dapat disesuaikan.
Pemesinan khusus dimungkinkan di ujung ulir penggerak.
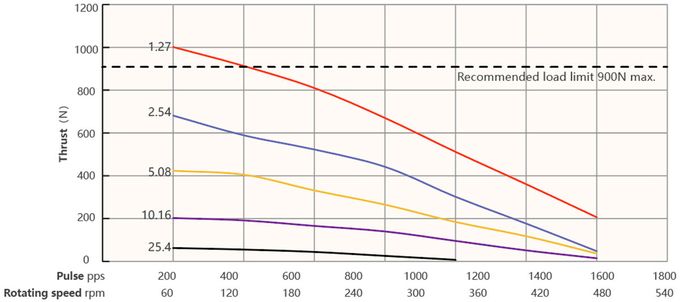
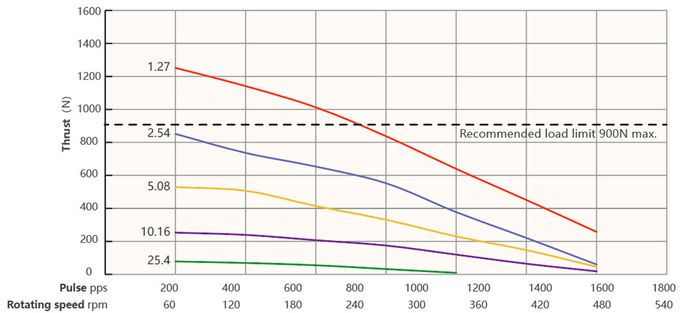
Kurva kecepatan dan daya dorong:
Penggerak Chopper bipolar seri 57 dengan panjang motor 45mm
Frekuensi pulsa arus 100% dan kurva dorong (sekrup ulir Φ9,525mm)
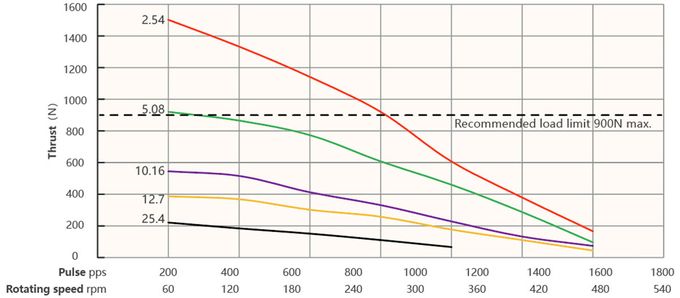
Penggerak Chopper bipolar seri 57 dengan panjang motor 55mm
Frekuensi pulsa arus 100% dan kurva dorong (sekrup ulir Φ9,525mm)
| Jarak (mm) | Kecepatan linier (mm/s) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7,62 | 8,89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7,62 | 10.16 | 12.7 | 15.24 | 17,78 | 20.32 | 22,86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35,56 | 40,64 | 45,72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40,64 | 50.8 | 60,96 | 71.12 | 81,28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
Kondisi pengujian:
Penggerak chopper, tanpa peningkatan tegangan bertahap, setengah mikro-langkah, tegangan penggerak 40V
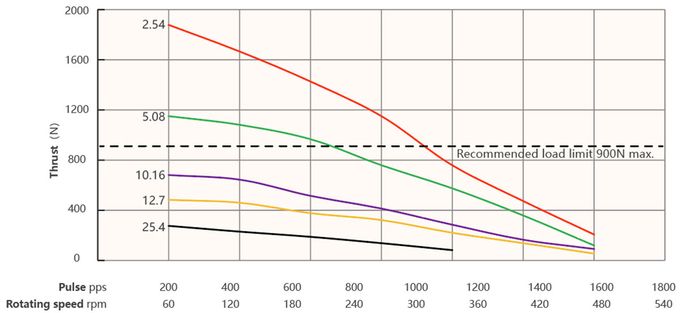
Penggerak Chopper bipolar seri 57 dengan panjang motor 65mm
Frekuensi pulsa arus 100% dan kurva dorong (sekrup ulir Φ9,525mm)
Penggerak Chopper bipolar seri 57 dengan panjang motor 75mm
Frekuensi pulsa arus 100% dan kurva dorong (sekrup ulir Φ9,525mm)
| Jarak (mm) | Kecepatan linier (mm/s) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7,62 | 8,89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7,62 | 10.16 | 12.7 | 15.24 | 17,78 | 20.32 | 22,86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35,56 | 40,64 | 45,72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40,64 | 50.8 | 60,96 | 71.12 | 81,28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
Kondisi pengujian:
Penggerak chopper, tanpa peningkatan tegangan bertahap, setengah mikro-langkah, tegangan penggerak 40V
Bidang aplikasi
Pencetakan 3D:Motor stepper hibrida 57mm banyak digunakan pada printer 3D untuk mengontrol posisi dan pergerakan kepala cetak.
Mesin Perkakas CNC:Pada mesin perkakas Computer Numerical Control (CNC), motor stepper hibrida 57mm digunakan untuk mengontrol pergerakan alat potong untuk operasi pemesinan yang presisi.
Peralatan otomatisasi:Motor stepper hibrida 57mm dapat digunakan dalam berbagai peralatan otomatisasi, seperti mesin pengemas otomatis, sistem penyortiran otomatis, jalur perakitan otomatis, dll., untuk mengontrol pergerakan dan pemosisian.
Mesin Tekstil:Dalam industri tekstil, motor stepper hibrida 57mm dapat digunakan untuk mengontrol mesin pemintal, mesin tenun, dan peralatan lainnya guna memastikan akurasi dan stabilitas proses tekstil.
Peralatan medis:Motor stepper hibrida 57mm banyak digunakan dalam peralatan medis seperti pompa jarum suntik medis, robot medis, peralatan pemindai gambar, dll., untuk kontrol posisi dan kontrol gerakan yang presisi.
Robotika:Motor stepper hibrida 57mm digunakan dalam berbagai aplikasi robotika, termasuk robot industri, robot layanan, robot kolaboratif, dll., untuk gerakan dan manipulasi yang presisi.
Sistem Pergudangan Otomatis:Dalam sistem pergudangan dan logistik otomatis, motor stepper hibrida 57mm dapat digunakan untuk mengontrol sabuk konveyor, elevator, derek penumpuk, dan peralatan lainnya untuk mencapai penempatan dan penanganan barang yang akurat.
Ini hanyalah beberapa aplikasi tipikal dari motor stepper hibrida 57mm, dan sebenarnya, motor ini banyak digunakan di berbagai bidang lain, termasuk peralatan pencetakan, sistem keamanan, instrumen presisi, dan sebagainya.
Keuntungan
Rasio torsi terhadap ukuran yang tinggi:Meskipun ukurannya kompak, motor stepper hibrida 57mm dapat menghasilkan torsi keluaran yang tinggi. Hal ini membuatnya cocok untuk aplikasi di mana ruang terbatas, tetapi torsi tinggi dibutuhkan.
Kontrol loop terbuka:Motor stepper hibrida dapat beroperasi dalam sistem kontrol loop terbuka, yang berarti motor ini tidak memerlukan perangkat umpan balik posisi seperti encoder. Hal ini menyederhanakan sistem kontrol dan mengurangi biaya keseluruhan.
Penentuan posisi yang tepat:Motor stepper hibrida memberikan kemampuan pemosisian yang presisi karena resolusi langkahnya yang tinggi. Motor ini dapat bergerak dalam peningkatan kecil, memungkinkan pemosisian yang akurat dan pengulangan yang baik.
Pengoperasian yang lancar:Motor stepper hibrida dapat mencapai pengoperasian yang halus, terutama ketika digerakkan dengan teknik microstepping. Microstepping membagi setiap langkah menjadi sub-langkah yang lebih kecil, sehingga menghasilkan gerakan yang lebih halus dan mengurangi getaran.
Waktu respons cepat:Motor stepper hibrida memiliki waktu respons yang cepat, memungkinkan akselerasi dan deselerasi yang cepat. Fitur ini bermanfaat untuk aplikasi yang membutuhkan gerakan dinamis dan lincah.
Keandalan dan daya tahan yang tinggi:Motor stepper hibrida dikenal karena kekokohan dan keandalannya. Motor ini memiliki masa pakai yang lama, kebutuhan perawatan yang rendah, dan dapat tahan terhadap kondisi operasi yang berat.
Solusi hemat biaya:Dibandingkan dengan teknologi kontrol gerak lainnya seperti motor servo, motor stepper hibrida umumnya menawarkan solusi yang lebih hemat biaya. Motor ini memberikan keseimbangan yang baik antara kinerja dan keterjangkauan harga.
Integrasi mudah:Motor stepper hibrida tersedia secara luas dan kompatibel dengan berbagai elektronik penggerak dan sistem kontrol. Motor ini dapat dengan mudah diintegrasikan ke dalam berbagai jenis mesin dan pengaturan otomatisasi.
Efisiensi energi:Motor stepper hibrida hanya mengonsumsi daya saat bergerak, sehingga hemat energi. Saat diam, motor ini tidak memerlukan daya terus menerus, yang berkontribusi pada penghematan energi secara keseluruhan.
Persyaratan Pemilihan Motor:
►Arah pergerakan/pemasangan
►Persyaratan Pemuatan
►Persyaratan Stroke
►Persyaratan pemesinan akhir
►Persyaratan Presisi
►Persyaratan Umpan Balik Encoder
►Persyaratan Penyesuaian Manual
►Persyaratan Lingkungan
Bengkel produksi


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)