


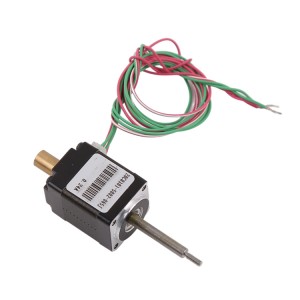
Motor stepper hibrida NEMA8 20mm dengan sudut langkah 1,8 derajat dan poros D.
Keterangan
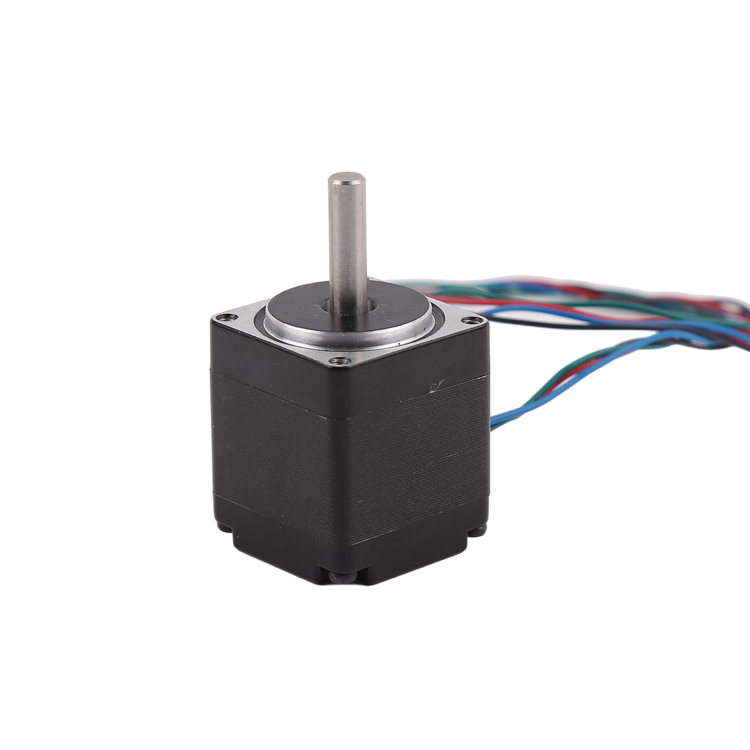
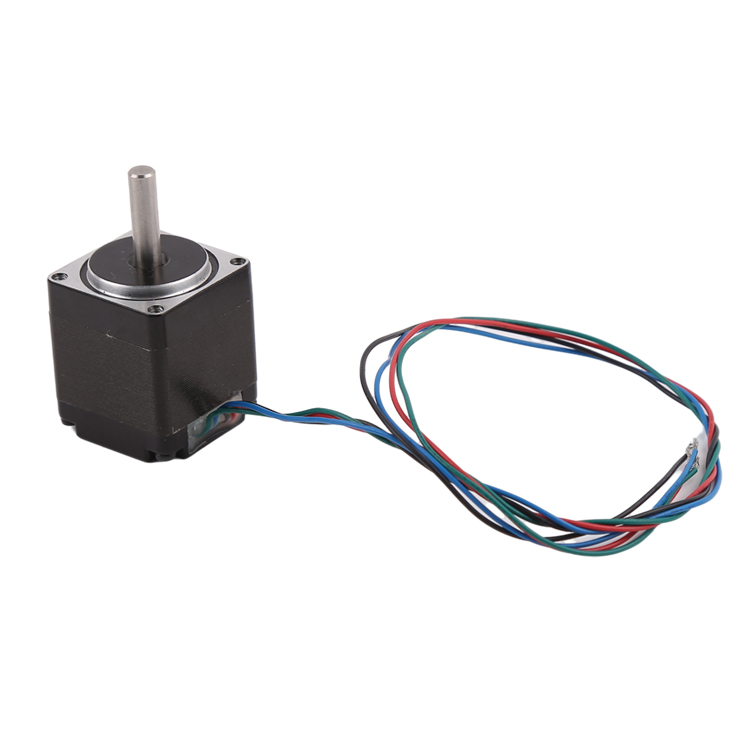
Motor NEMA8 ini adalah motor stepper hibrida berukuran 20 mm.
Motor ini adalah motor stepper hibrida berukuran kecil dan berpresisi tinggi dengan tampilan yang menarik dan performa yang sangat baik.
Sudut langkahnya adalah 1,8°, yang berarti dibutuhkan 200 langkah untuk melakukan satu putaran penuh.
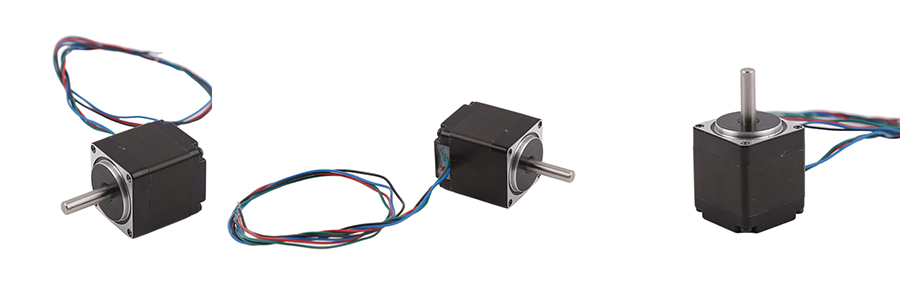
Panjang motor yang tersedia adalah 30mm, 38mm, dan 42mm; semakin panjang motor, semakin tinggi torsinya.
Yang berukuran 42mm memiliki torsi lebih besar sedangkan yang berukuran 30mm ukurannya lebih kecil.
Pelanggan dapat memilih panjang sesuai dengan kebutuhan torsi dan ruang mereka.
Selain itu, kami juga menawarkan layanan kustomisasi.
Pelanggan dapat memilih parameter di bawah ini sesuai dengan kebutuhan mereka. Jangan ragu untuk menghubungi kami jika ada pertanyaan tentang motor ini, dan kami akan memberikan dukungan yang lebih profesional.
Parameter
| Sudut Langkah (°) | Panjang motor (mm) | Torsi penahan (g*cm) | Saat ini /fase (A/fase) |
Perlawanan (Ω/fase) | Induktansi (mH/fase) | Jumlah prospek | Inersia rotasi (g*cm2) | Berat (KG) |
| 1.8 | 30 | 180 | 0,6 | 6.5 | 1.7 | 4 | 1.6 | 0,06 |
| 1.8 | 38 | 300 | 0,6 | 10 | 2.5 | 4 | 2.2 | 0,08 |
| 1.8 | 42 | 300 | 0,8 | 5.4 | 1.5 | 4 | 2.9 | 0,06 |
Parameter di atas adalah produk standar sebagai referensi, motor dapat disesuaikan berdasarkan kebutuhan pelanggan.
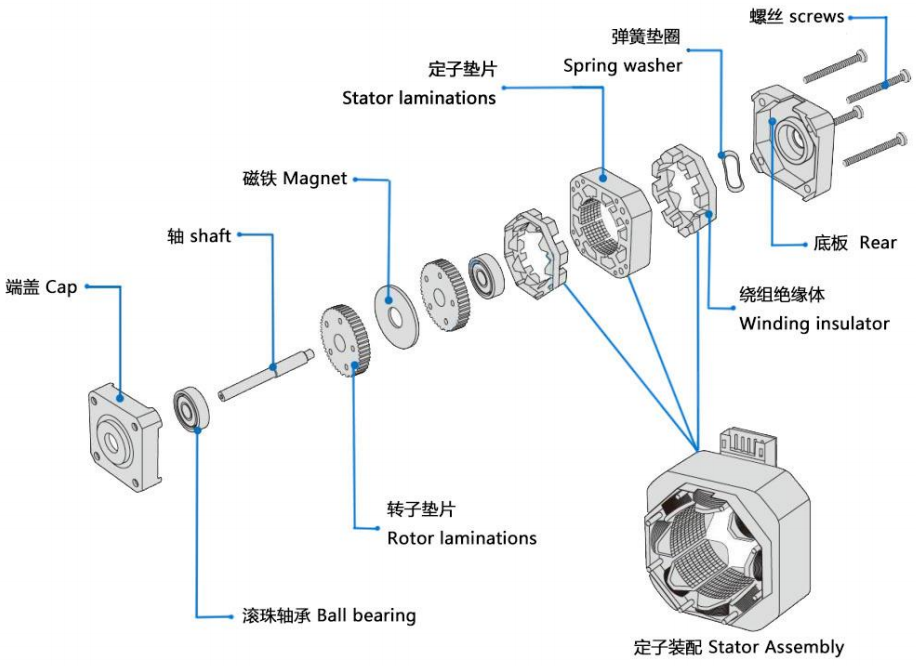
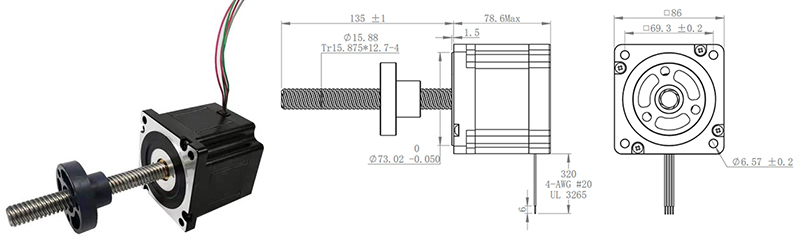
Gambar desain
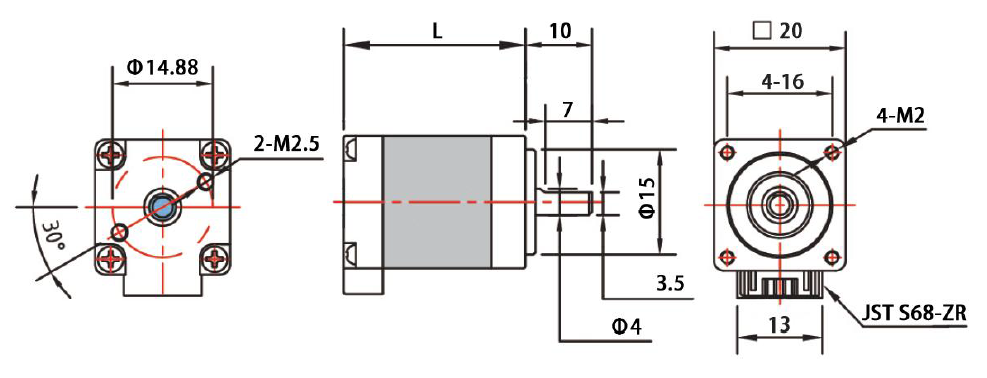
Struktur dasar motor stepper NEMA
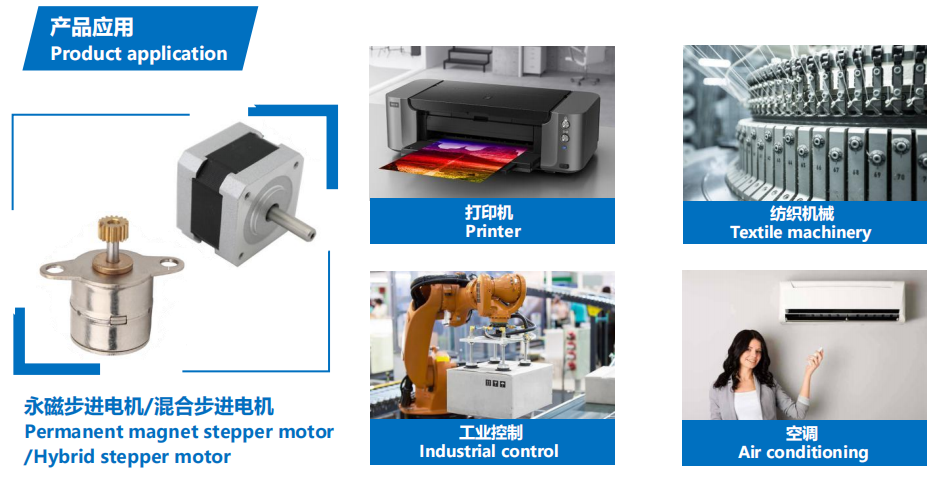
Penerapan motor stepper hibrida
Karena resolusi motor stepper hibrida yang tinggi (200 atau 400 langkah per putaran), motor ini banyak digunakan untuk aplikasi yang membutuhkan presisi tinggi, seperti:
pencetakan 3D
Kontrol industri (CNC, mesin penggiling otomatis, mesin tekstil)
Perangkat periferal komputer
Mesin pengemas
Dan sistem otomatis lainnya yang membutuhkan kontrol dengan presisi tinggi.
Catatan Aplikasi tentang motor stepper hibrida
Pelanggan sebaiknya mengikuti prinsip “memilih motor stepper terlebih dahulu, kemudian memilih driver berdasarkan motor stepper yang sudah ada”.
Sebaiknya jangan menggunakan mode penggerak langkah penuh untuk menggerakkan motor stepper hibrida, dan getarannya lebih besar saat menggunakan penggerak langkah penuh.
Motor stepper hibrida lebih cocok untuk penggunaan kecepatan rendah. Kami menyarankan kecepatan tidak melebihi 1000 rpm (6666PPS pada 0,9 derajat), lebih disukai antara 1000-3000PPS (0,9 derajat), dan dapat dipasangkan dengan gearbox untuk menurunkan kecepatannya. Motor ini memiliki efisiensi kerja tinggi dan kebisingan rendah pada frekuensi yang sesuai.
Karena alasan historis, hanya motor dengan tegangan nominal 12V yang menggunakan tegangan 12V. Tegangan nominal lain pada gambar desain bukanlah tegangan penggerak yang paling tepat untuk motor tersebut. Pelanggan harus memilih tegangan penggerak dan driver yang sesuai berdasarkan kebutuhan mereka sendiri.
Saat motor digunakan dengan kecepatan tinggi atau beban besar, umumnya motor tidak langsung beroperasi pada kecepatan kerja. Kami menyarankan untuk meningkatkan frekuensi dan kecepatan secara bertahap. Ada dua alasan: Pertama, agar motor tidak kehilangan langkah, dan kedua, hal ini dapat mengurangi kebisingan dan meningkatkan akurasi pemosisian.
Motor tidak boleh bekerja di area getaran (di bawah 600 PPS). Jika harus digunakan pada kecepatan rendah, masalah getaran dapat dikurangi dengan mengubah tegangan, arus, atau menambahkan peredam.
Saat motor bekerja di bawah 600PPS (0,9 derajat), motor tersebut harus digerakkan oleh arus kecil, induktansi besar, dan tegangan rendah.
Untuk beban dengan momen inersia yang besar, motor berukuran besar harus dipilih.
Jika dibutuhkan presisi yang lebih tinggi, hal itu dapat diatasi dengan menambahkan gearbox, meningkatkan kecepatan motor, atau menggunakan penggerak subdivisi. Motor 5 fase (motor unipolar) juga dapat digunakan, tetapi harga keseluruhan sistem relatif mahal, sehingga jarang digunakan.
Ukuran motor stepper:
Saat ini kami memiliki motor stepper hibrida 20mm (NEMA8), 28mm (NEMA11), 35mm (NEMA14), 42mm (NEMA17), 57mm (NEMA23), dan 86mm (NEMA34). Kami menyarankan untuk menentukan ukuran motor terlebih dahulu, kemudian konfirmasikan parameter lainnya, saat Anda memilih motor stepper hibrida.
Layanan kustomisasi
Desain motor dapat disesuaikan berdasarkan kebutuhan pelanggan, termasuk:
Diameter motor: kami memiliki motor dengan diameter 6mm, 8mm, 10mm, 15mm, dan 20 mm.
Resistansi kumparan/tegangan nominal: resistansi kumparan dapat disesuaikan, dan dengan resistansi yang lebih tinggi, tegangan nominal motor juga lebih tinggi.
Desain braket/panjang ulir: jika pelanggan menginginkan braket yang lebih panjang/pendek, dengan desain khusus seperti lubang pemasangan, hal itu dapat disesuaikan.
PCB + kabel + konektor: Desain PCB, panjang kabel, dan jarak antar konektor semuanya dapat disesuaikan, dan dapat diganti dengan FPC jika pelanggan membutuhkannya.
Waktu Tunggu
Jika kami memiliki sampel yang tersedia, kami dapat mengirimkan sampel dalam waktu 3 hari.
Jika kami tidak memiliki sampel yang tersedia, kami perlu memproduksinya, waktu produksi sekitar 20 hari kalender.
Untuk produksi massal, waktu tunggu tergantung pada jumlah pesanan.
Metode pembayaran dan ketentuan pembayaran
Untuk pengiriman sampel, umumnya kami menerima pembayaran melalui Paypal atau Alibaba.
Untuk produksi massal, kami menerima pembayaran T/T.
Untuk sampel, kami menerima pembayaran penuh sebelum produksi.
Untuk produksi massal, kami dapat menerima pembayaran di muka 50% sebelum produksi, dan menagih sisa pembayaran 50% sebelum pengiriman.
Setelah kita melakukan kerja sama pesanan lebih dari 6 kali, kita dapat menegosiasikan ketentuan pembayaran lain seperti A/S (setelah dilihat).
Pertanyaan yang Sering Diajukan (FAQ)
1. Berapa lama waktu pengiriman umum untuk sampel? Berapa lama waktu pengiriman untuk pesanan besar di bagian back-end?
Waktu pemrosesan pesanan sampel sekitar 15 hari, sedangkan waktu pemrosesan pesanan dalam jumlah besar adalah 25-30 hari.
2. Apakah Anda menerima layanan kustomisasi?
Kami menerima pesanan produk yang disesuaikan, termasuk parameter motor, jenis kabel, poros keluaran, dll.
3. Apakah memungkinkan untuk menambahkan encoder ke motor ini?
Untuk jenis motor ini, kita dapat menambahkan encoder pada penutup aus motor.
Pertanyaan yang Sering Diajukan
1. Cara mengurangi panas pada motor stepper:
Mengurangi pembangkitan panas berarti mengurangi kehilangan tembaga dan kehilangan besi. Mengurangi kehilangan tembaga dilakukan dalam dua arah, yaitu mengurangi resistansi dan arus, yang membutuhkan pemilihan resistansi kecil dan arus nominal sekecil mungkin ketika menggunakan motor, terutama motor dua fasa, yang dapat digunakan secara seri tanpa paralel. Namun, hal ini seringkali bertentangan dengan persyaratan torsi dan kecepatan tinggi. Untuk motor yang dipilih, fungsi kontrol arus setengah otomatis dan fungsi offline dari drive harus dimanfaatkan sepenuhnya; fungsi kontrol arus setengah otomatis secara otomatis mengurangi arus ketika motor dalam keadaan diam, sedangkan fungsi offline hanya memutus arus. Selain itu, drive subdivisi, karena bentuk gelombang arus mendekati sinusoidal, harmoniknya lebih sedikit, sehingga pemanasan motor juga akan lebih rendah. Ada beberapa cara untuk mengurangi kehilangan besi, dan tingkat tegangan berkaitan dengannya. Meskipun motor yang digerakkan oleh tegangan tinggi akan meningkatkan karakteristik kecepatan tinggi, hal itu juga meningkatkan pembangkitan panas. Oleh karena itu, kita harus memilih tingkat tegangan drive yang tepat, dengan mempertimbangkan kecepatan tinggi, kelancaran, panas, kebisingan, dan indikator lainnya.
Kirim pesan Anda kepada kami:
Kategori Produk
-
Motor stepper hibrida linier NEMA8 20mm dengan pengoperasian...
-

Motor stepper hibrida NEMA11 ukuran 28mm 1,8 derajat...
-
Motor stepper hibrida linier NEMA11 28mm tanpa kapasitor...
-

Motor stepper gearbox planet 35mm (NEMA 14) ...
-

NEMA 6 presisi tinggi dua fasa 4 kawat 14mm hibrida...
-

Motor stepper presisi tinggi 42mm NEMA 17 hibrida...